 ENGLISH
ENGLISHTel:400 821 7118
Fax:021 6291 7119
E-mail:info@sipworks.com.cn



以下以一个焊接支架为例,讨论使用SW Simulation如何进行模态分析,以及除结构件外,其它一些功能部件对结构件模态的影响。
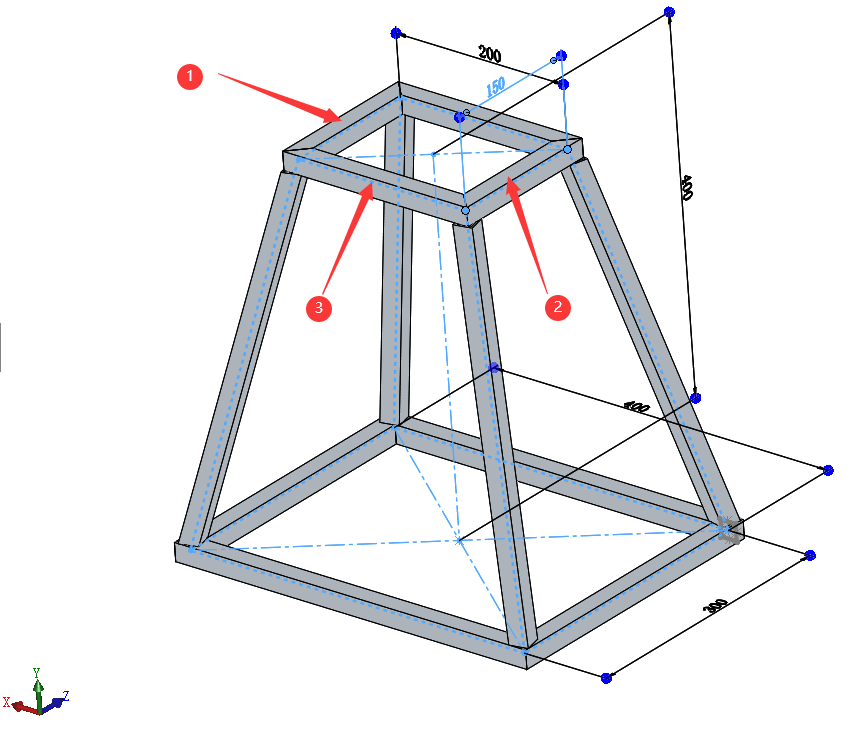
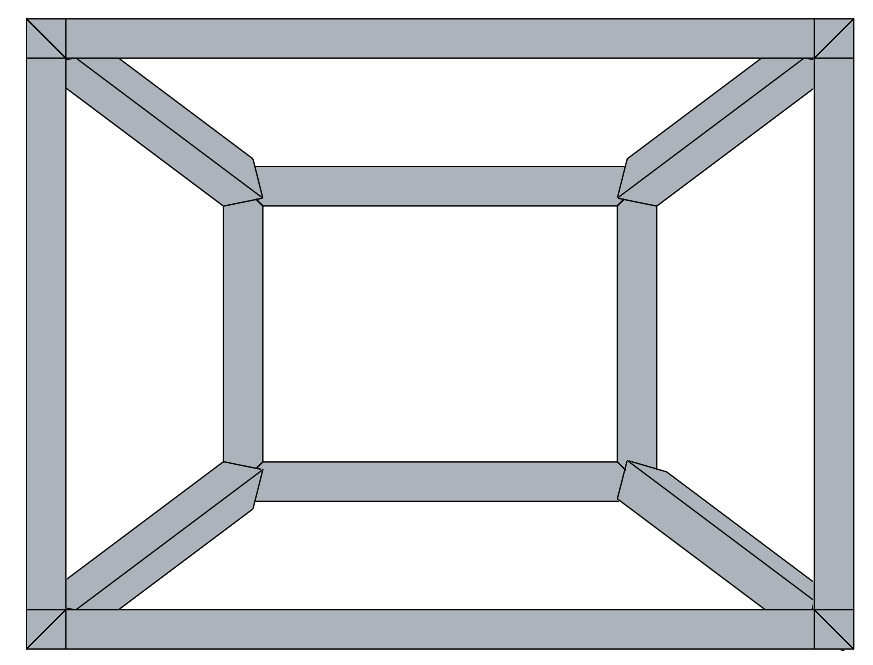
焊接件的设计如下图,其中1,2两个面上有一块板,上面放置电机;3面上有一个支撑结构,架起一个风机。架子使用的是F20T2的方管,材料为Q235,自重为4.17kg。
当结构确定之后,模型本身就具有模态的属性,与模型的材料无关。
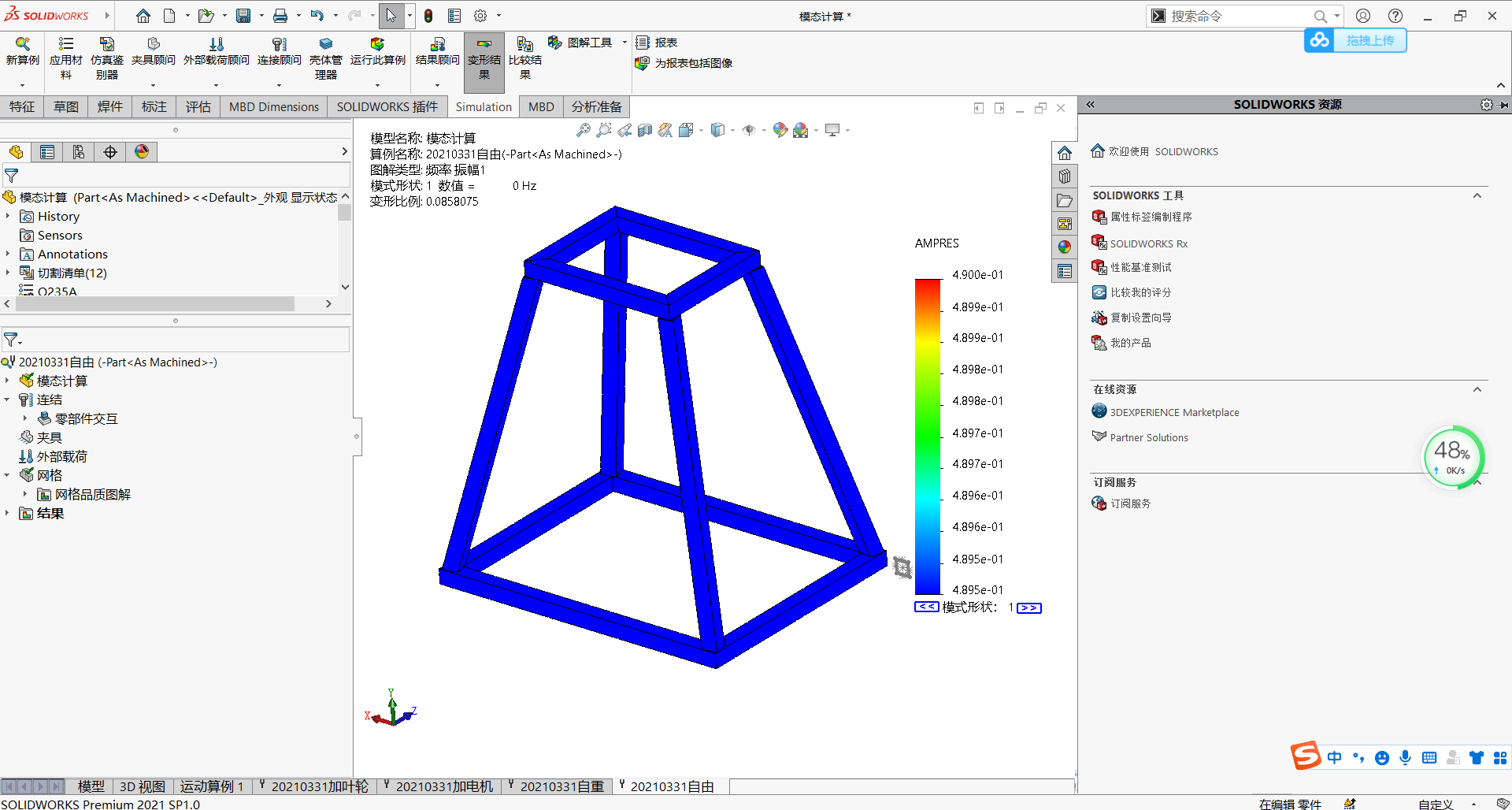
1. 不添加任何约束及载荷,计算架子的前10阶模态。
所有分析算例中都采用结合的全局接触,使用5mm大小的网格进行计算。
列举质量参与,如下图:
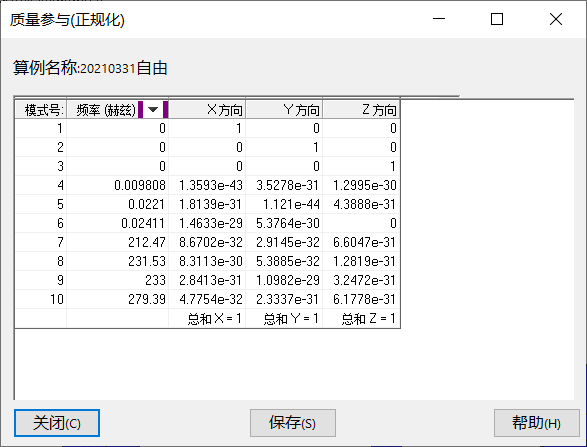
可以看出前6阶模态都很小,这是由于没有添加约束而造成的刚体模式。此时固有频率应从第7阶看起。对应的频率是212Hz,转换成转速为12,720 rpm。
可在网站(https://www.convertworld.com/zh-hans/frequency/)输入频率后自动转换成转速值。
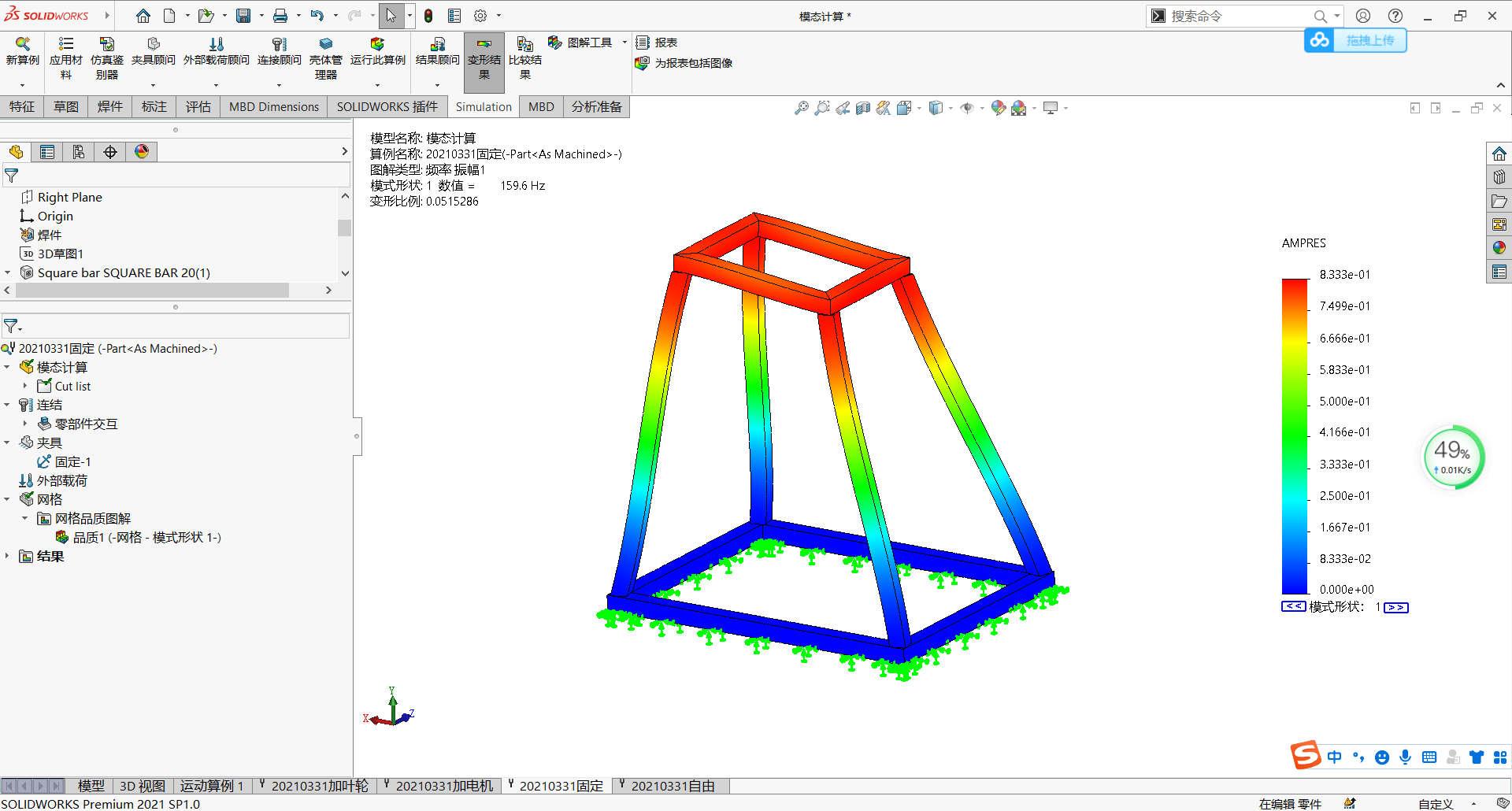
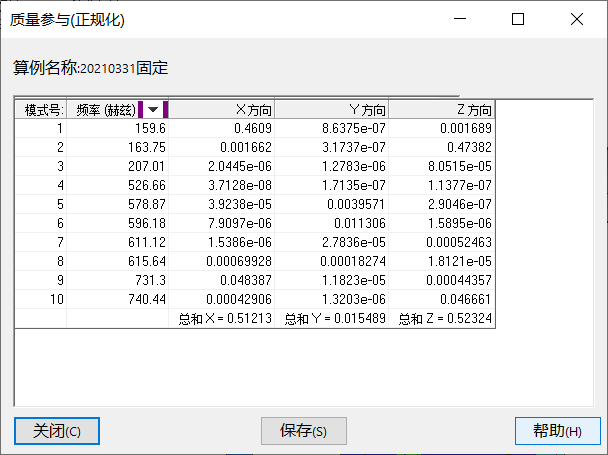
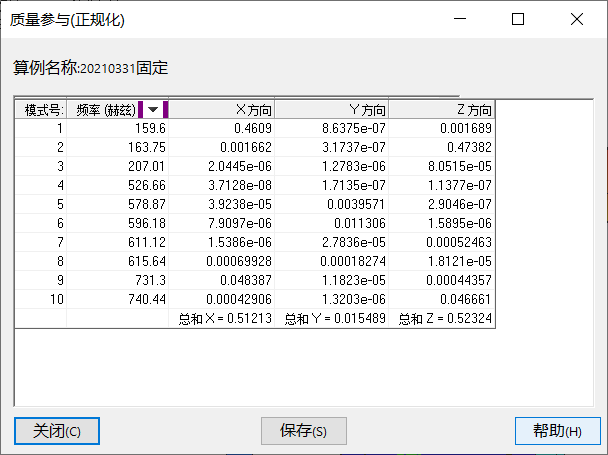
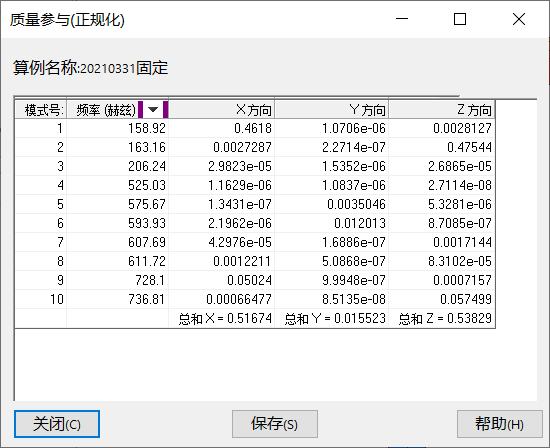
1. 给支架四个底面添加固定的约束,
列举质量参与,如下图:
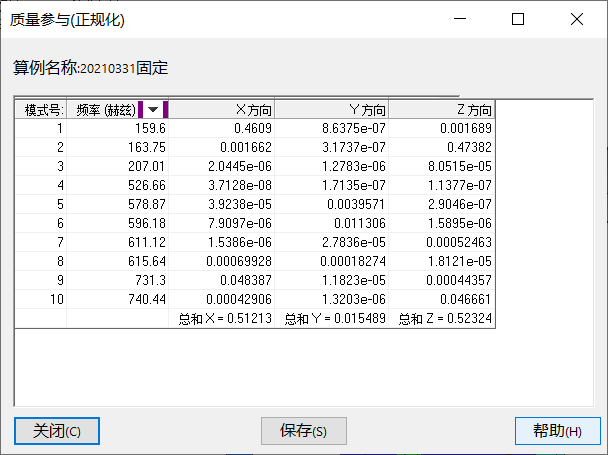
由于添加了约束,消除了刚体模式。此时1阶固有频率为159.6Hz,对应的转速为9,576 rpm。
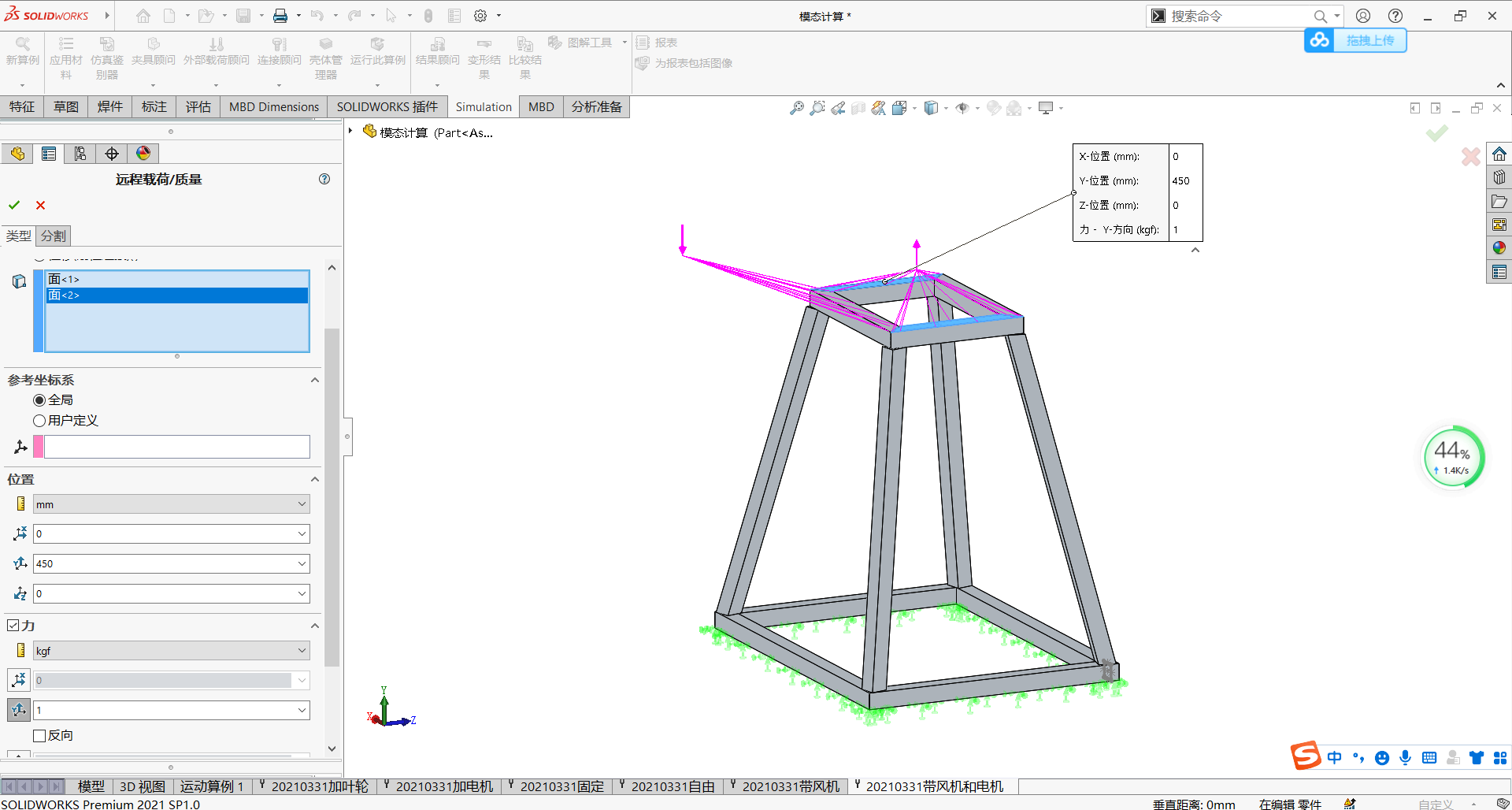
1. 考虑风机的参与。
风机的模型简化掉。在支撑风机的位置处添加远程载荷。
添加远程载荷,类型使用刚性连接。此时需要参考风机的重心位置,设置远程载荷的施力位置,可以利用全局坐标系或者自建的参考坐标系添加。假设风机的重心在全局坐标系中的位置为X:0,Y,500,Z:-300。
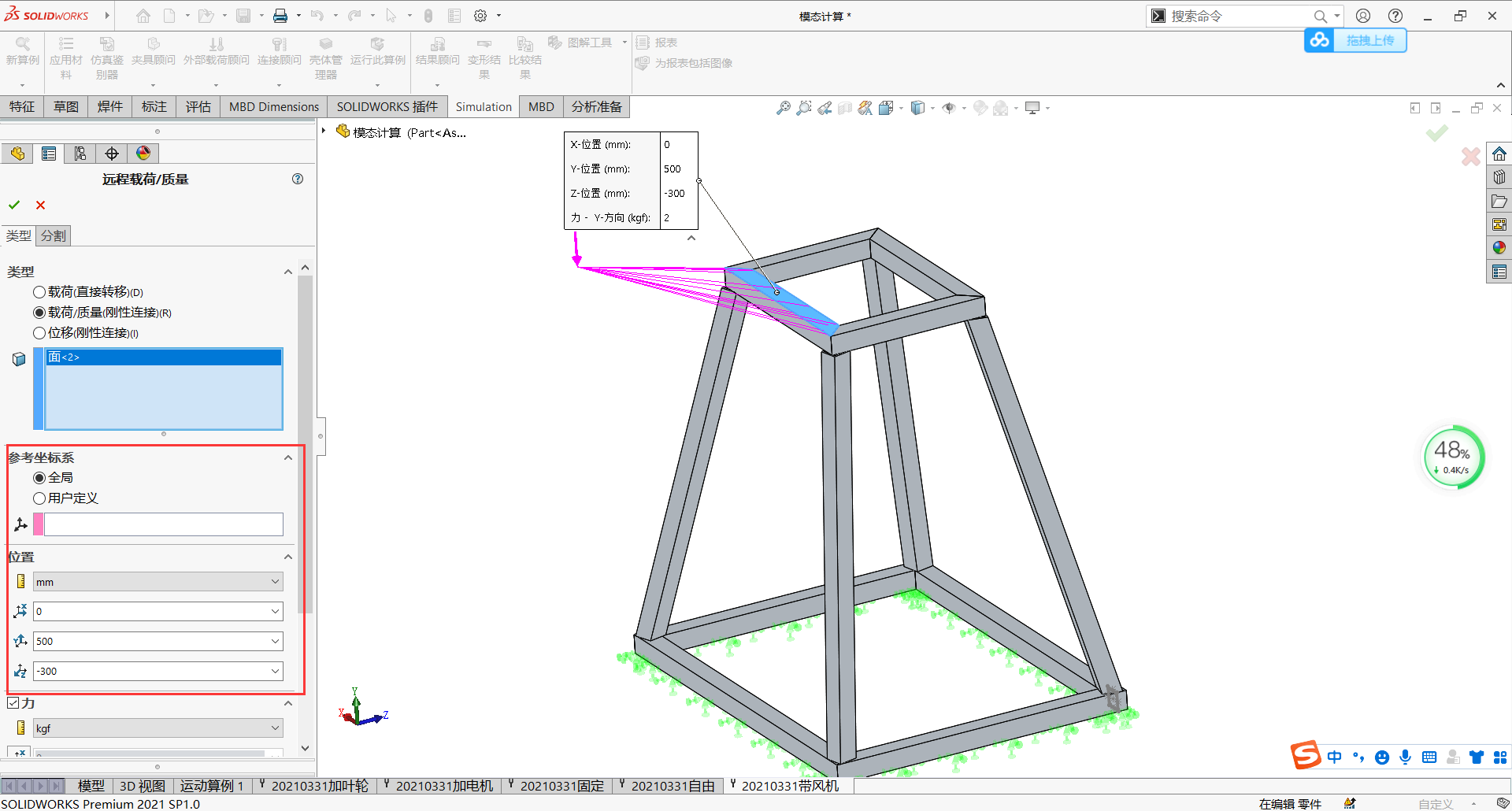
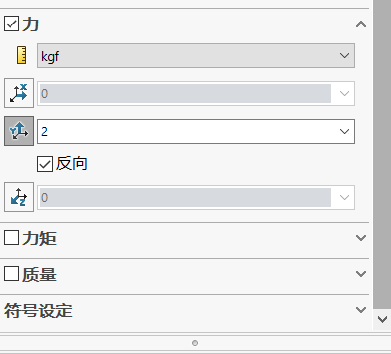
在力的选项下修改单位为kgf,,假设风机的自重为2kg,注意力的方向的设定是否正确。
使用与前述相同的接触条件及网格大小进行计算。
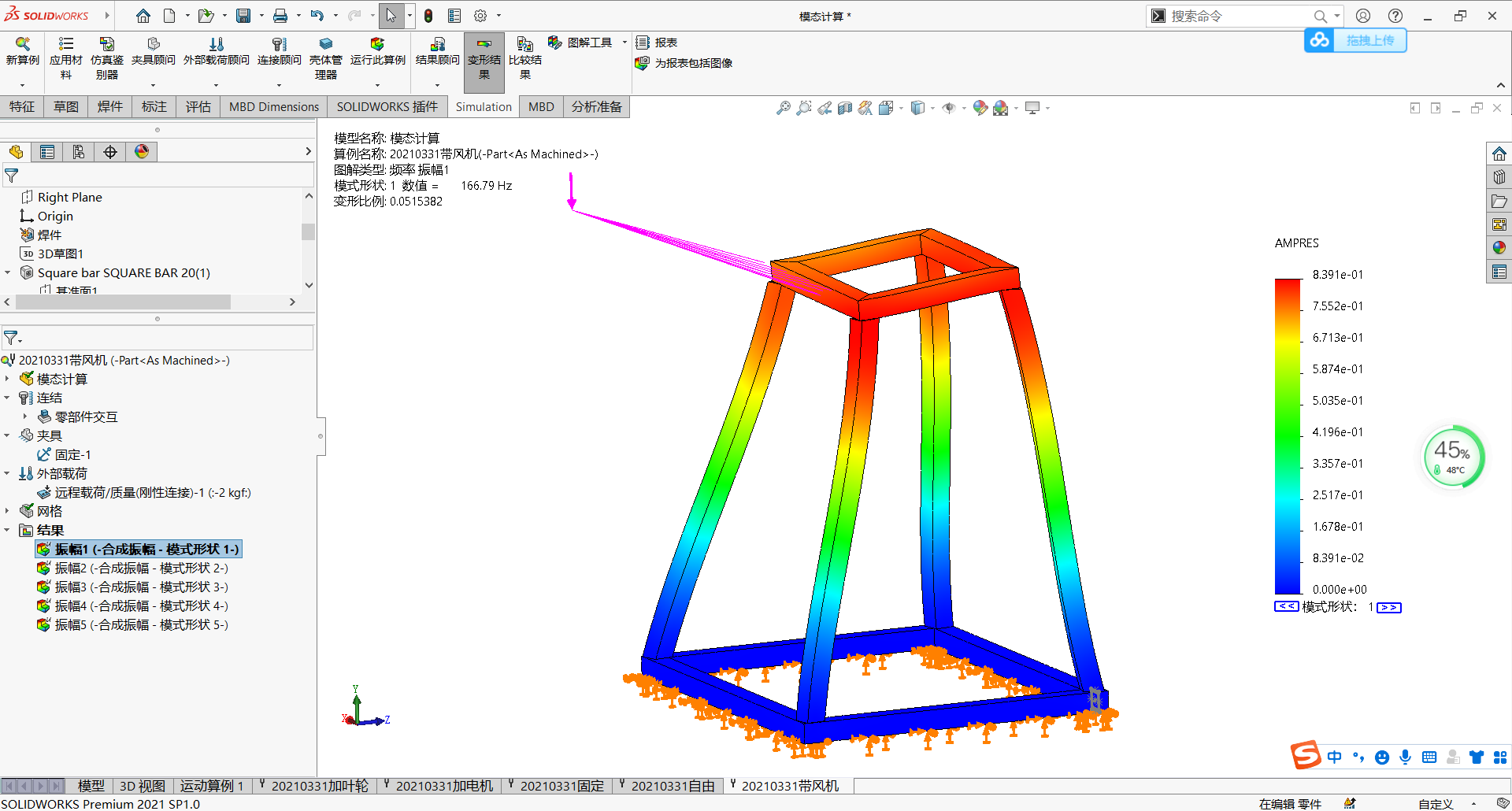
列举质量参与,如下图:
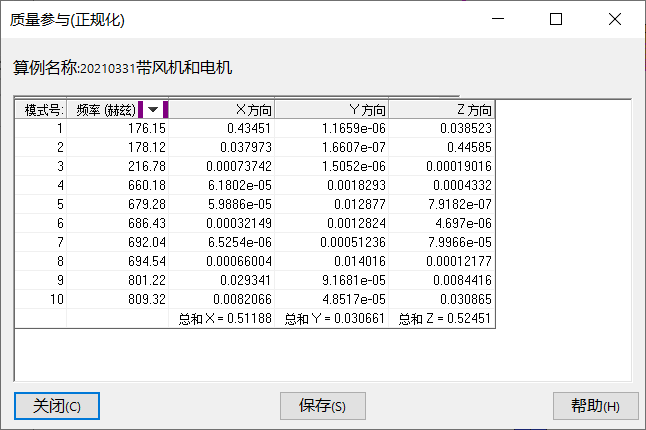
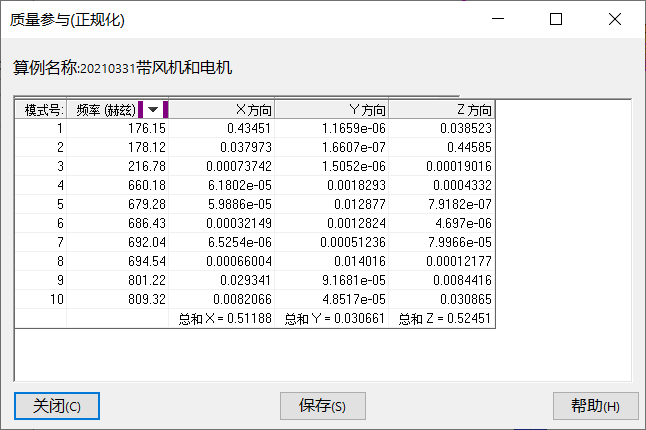
4.考虑电机的参与。
与前述添加风机的远程载荷的过程相同,添加电机的远程载荷。
假设电机自重1kg,重心位置在全局坐标系下的位置如下图。
使用与前述相同的接触条件及网格大小进行计算。
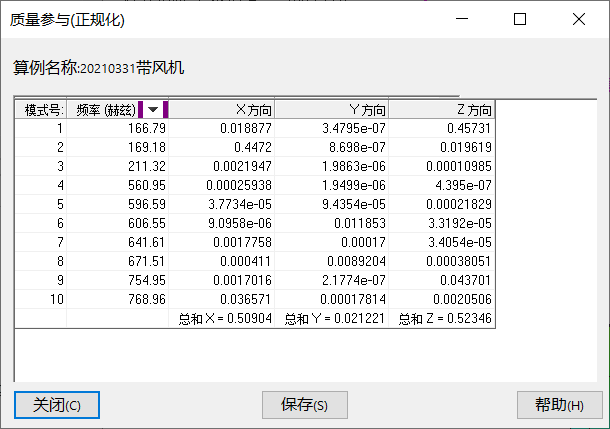
列举质量参与,如下图:
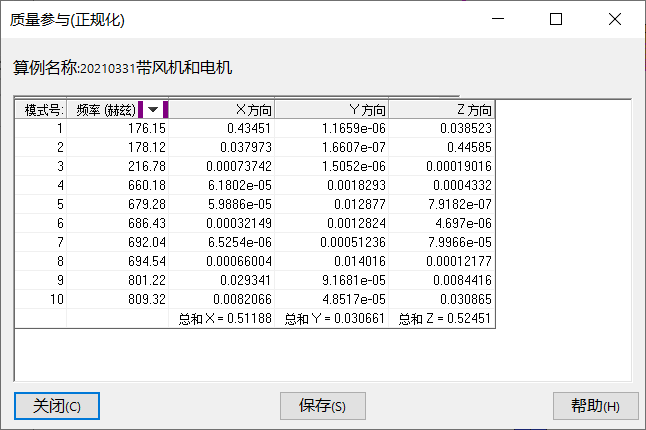
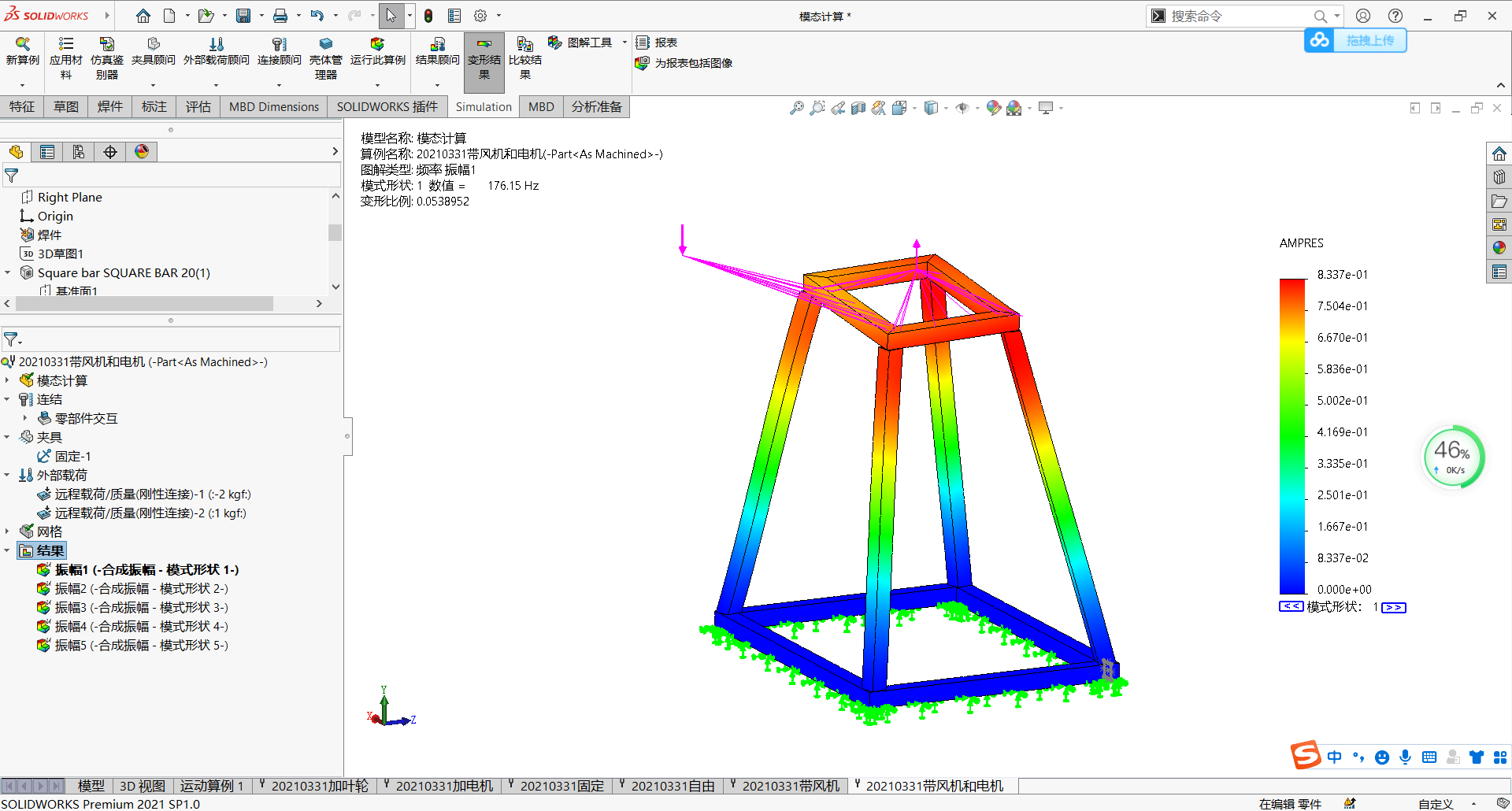
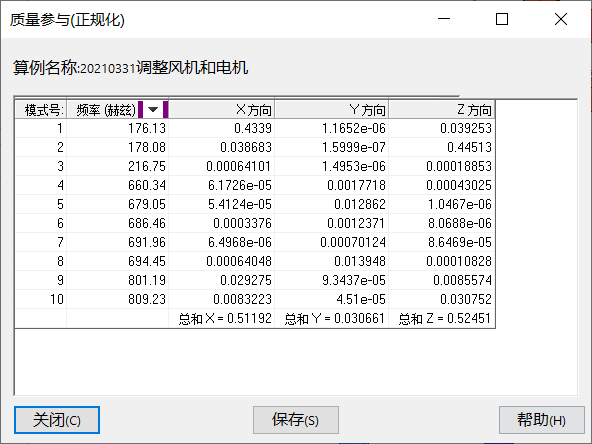
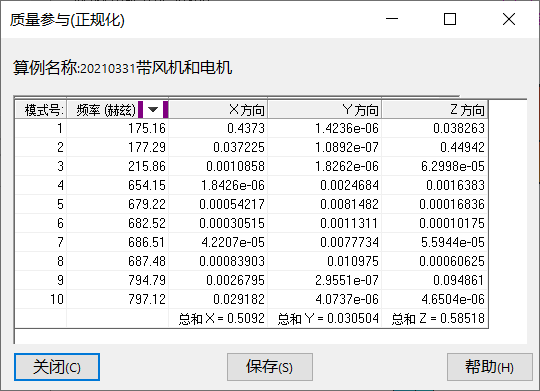
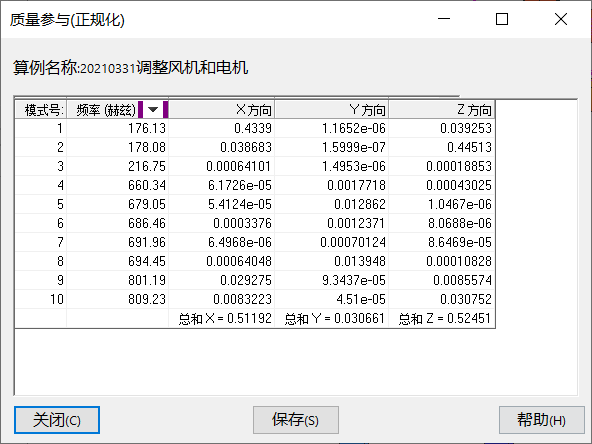
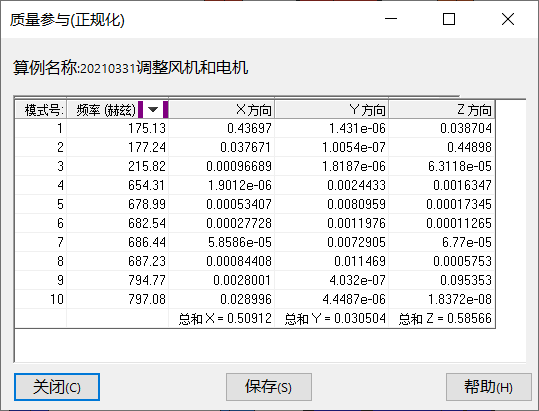
5.修改风机和电机的重量后,再次计算。

列举质量参与,如下图:
结果对比:
1)左为不带风机和电机,右为带风机和电机。
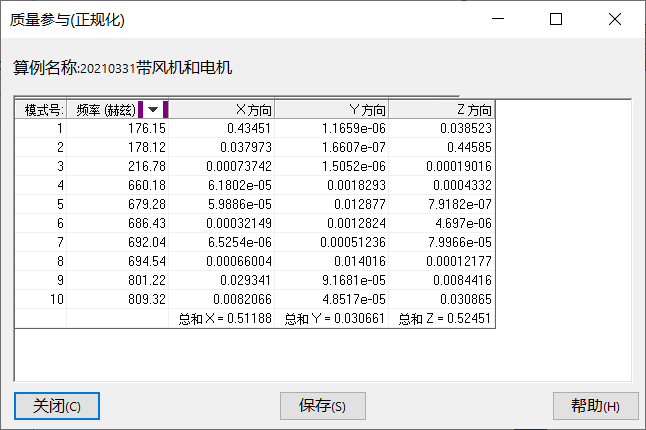
可以看到添加风机和电机重量载荷后,对频率的影响较大。
2)左为风机2kg和电机1kg,右为风机40kg和电机10kg。
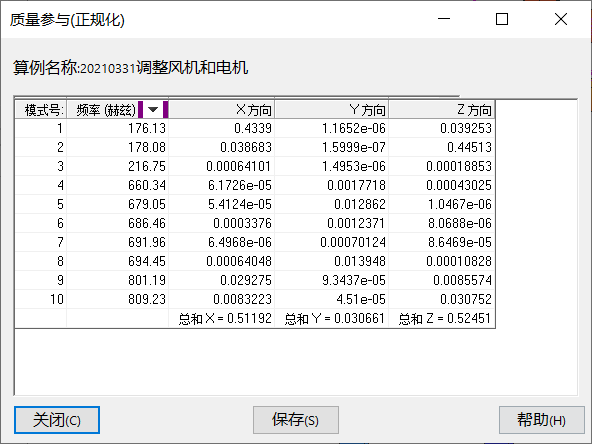
可以看到风机和电机重量变化后,对频率的不大。
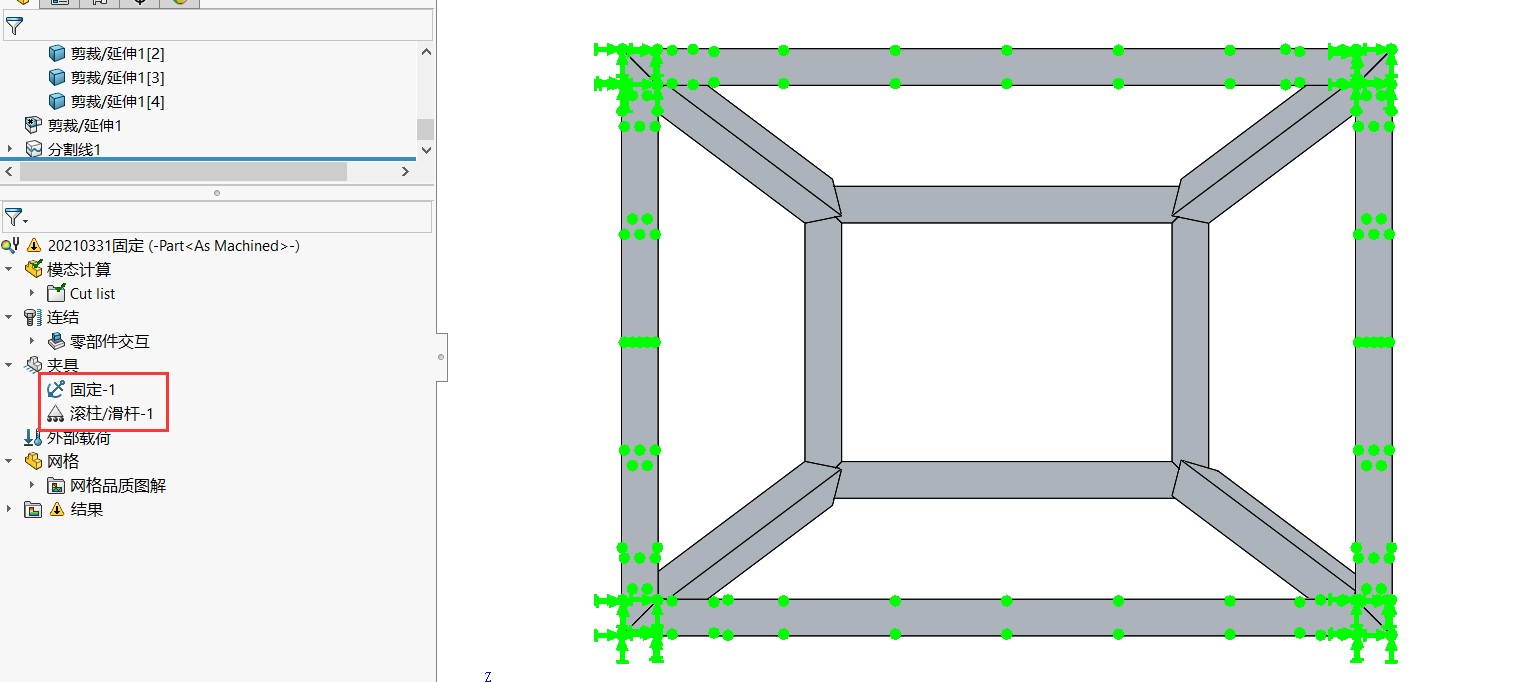
6.上面的算例中,支架底面添加了固定约束,表达底面与底面之间是焊接的关系,或者底部被埋入底面。
若采用底部四个边角使用地脚螺栓的方式连接,需修改夹具样式。
首先调整模型,使用分割线命令将底部固定部分分割出单独的面,并添加固定的约束。
底部其它面需添加滚柱/滑杆的约束。
再次对之前所做的假设情形进行计算并对比计算结果:
1)不考虑风机和电机重量,左为底面固定,右为底面部分固定。
2)风机4kg和电机1kg,左为底面固定,右为底面部分固定。
3)风机40kg和电机10kg,左为底面固定,右为底面部分固定。
可以看到,不同的夹具的设定,表达不同的连接方式,且对结果有一定的影响。
总结:
通过上述的分析,看到不同的模型简化方式对计算结果存在着影响。
在有限元分析中,边界条件(夹具、载荷等)的设定与实际设备工作情形越接近,结果会越准确;有限元模型的细节越多,结果越准确。
更准确的边界条件的设定和更多的模型细节会导致计算量的增加,计算时间的加长。在做有限元分析的时候,需要做好计算结果准确度与计算时间长短之间的平衡。
